Close 
Choose your language

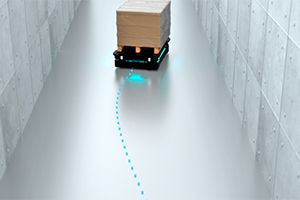
Autonomous Navigation
Autonomous navigation refers to the capability of robots to navigate and move through their environment without human intervention. This involves the robot sensing its surroundings, planning its path, and making decisions to reach a designated location safely and efficiently.
Recommended Browser & Settings. We recommend using the latest version of Microsoft Edge or Google Chrome to view the e-Learning modules. JavaScript must be enabled.
Lessons

Industrial automation with AGVs and AMRs
Learn about the similarities and differences between automated guided vehicles (AGVs) and autonomous…
 5m
5m

How AMRs localize themselves
Learn about the two key components that MiR robots rely on to operate effectively.
8m
Why MiR robots need a map
Learn why MiR robots require a map of their environment to efficiently navigate from one location to…
10m

How MiR robots plan their path
Get an overview of how MiR robots plan paths based on their current position and the position of the…
8m

Identify zones on your map
Learn how you can use zones to mark an entire area where you want to influence how the robot behaves…
15m

Identify positions on your map
Learn how to use different types of positions on the map to send the robot to.
5m

Identify markers on your map
Discover how to use different markers that the robot can dock to.
12m
Ideal operating environments for MiR robots
Explore MiR robots' ideal operating environments.
10m

Simultaneous localization and mapping (SLAM)
Learn how the MiR robot uses SLAM technology to simultaneously build maps and localize itself.
12m

Record your map
Learn how to create a map by manually driving the robot around a facility and let the robot use its…
20m

Clean your map
Learn how to optimize the raw map created together with your robot.
20m
Create zones
Learn how to create different zones on the robot's map.
5m

Define positions
Learn how to define positions on the robot's map.
5m

Add markers
Learn how to add and configure markers on the robot's map.
7m

Upload/download a CAD drawing
Get an overview of uploading a CAD (computer-aided design) map or downloading the robot's SLAM map t…
5m

How the robot's footprint affects navigation
Watch how the robot's footprint can affect navigation
5m

Pass narrow corridors
Go over the steps to set up a MiR600 or MiR1350 to pass narrow corridors efficiently.
20m
Optimizing Planner Zones
Learn how to create a planner zone and program the robot’s behavior for that area.
7m

I/O module and Access zones
Learn about situations where you can use I/O module and Access zones.
7m
How your robots navigate to a goal position
Dive deeper into the robot's process for navigating to its goal position.
5m

You have completed all the lessons in this pathway. Explore another skill path or join one of our Specialized Training Programs.